Informatikwerkstatt-MR WS 15/16
(G. Kemnitz, C. Giesemann)
Die Informatikwerkstatt gibt einen ersten praxisorientierten Einblick in die typischen Arbeitsfelder und berufsbezogene Tätigkeiten von InformatikerInnen. Die Studierenden werden im Team an vordefinierten und selbstgewählten Projekten typische Aktivitäten der Informatik herangeführt.
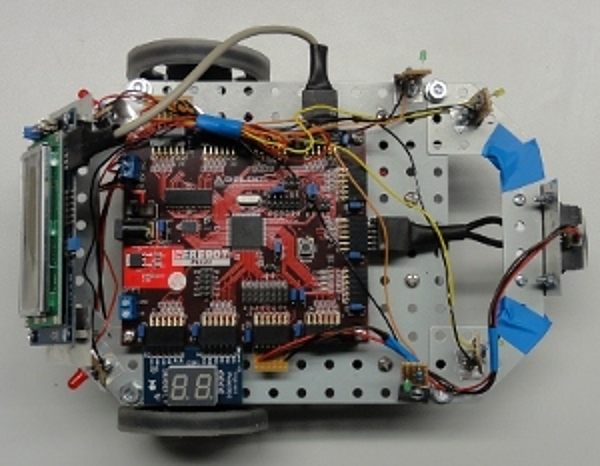
| Mikrorechner" ist das praktische Ziel, ein Roboterfahrzeug aus einem System von Mikrorechnerbaugruppen und mechanischen Bauteilen aufzubauen und das gewünschte Verhalten einzuprogrammieren. Dazu wird in der ersten Projektphase die C-Programmierung mit AVR-Studio eingeführt und geübt. Die Mini-Projekte der zweiten Phase umfassen Beispiele für die Motoransteuerung die Wegemessung, das Lesen und Verarbeiten der Daten vom Abstands- und den Bodensensoren. |
Die Arbeiten erfolgen im Labor. Es stehen ein sachkundiger Betreuer, der Fragen beantwortet, Labormesstechnik und auf Wunsch Löt- und mechanische Arbeitsplätze zur Verfügung. [Folien zur Einführungsveranstaltung]

Foliensätze
- [Foliensatz 1]
- Einleitung: Ziel und Arbeitsprogramm, Entwicklungsumgebung, erstes Programm.
- Bitverarbeitung: Bitoperationen, binäre Fallunterscheidung, Auswahlanweisung, Automaten und Warteschleifen.
- [Foliensatz 2]
- C-Programmierung: Variablen, Typ- und Wertekontrollen, Modularisierung, Simulation eines Modultests.
- [Foliensatz 3]
- PC-Kommunikation: Protokoll, Echoprogramm, Textdarstellung, Test mit Python, Bluetooth, Test mit Logikanalysator, Modularisierung.
- [Foliensatz 4]
- Weiter Geräte mit USART: LC-Display, Sonar-Sensor.
- IO-Hintergrundprozesse: Treiber LCD-Monitor, Treiber PC-Kommunikation, Treiber Sonar-Sensor, Test der Treiber
- [Foliensatz 5]
- Timer: Funktionsweise, Experiment.
- Interrupts: die Treiber comir_tmr, comir_lcd, comir_pc und comir_sonar. Testbeispiele für alle Treiber.
- [Foliensatz 6]
- Motoren: Drehzahlsteuerung, Drehzahlmessung, Motorkennlinie, PI-Regler, Reglerprogramm, Python-Motorsteuerprogramm.
- [Foliensatz 7]
- Joystick-Ansteuerung.
- Infrarot-Abstandssensor.
- Liniensensor.
Dokumentationen
- [Beispielprogramme]: [ZIP-Datei]
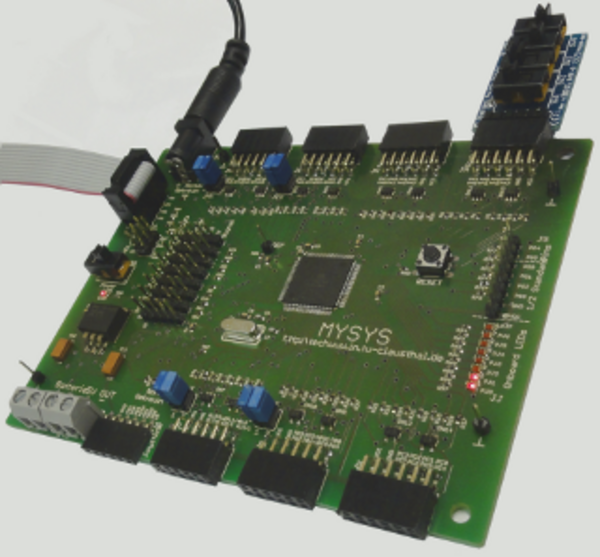
- Mikrorechnerboard "MYSYS": Beschreibung [Schaltplan (Eagle)] [Board (Eagle)]
- Fahrzeugbausatz und Ansteckmodule:
| Typ | Beschreibung | Schaltplan |
|---|---|---|
| Fahrzeugbausatz | Anbieter [Montage.pdf] | |
| 4 Schalter | [PmodSWT_rm.pdf] | [PmodSWT_sch.pdf] |
| Joystick | [PmodJSTK_rm.pdf] | [PmodJSTK_sch.pdf] |
| 8 Leuchtdioden | [Pmod8LD_rm.pdf] | [Pmod8LD_sch.pdf] |
| LC-Display | [PmodCLS_rm.pdf] | [PmodCLS_sch.pdf] |
| USB / serielle Schnittstelle | [PmodUSBUART_rm.pdf] | [PmodUSBUART_sch.pdf] |
| H-Brücke | [PmodHB5_rm.pdf] | |
| Trigger für IR-Reflexlichtschranken | [PmodLS1_rm.pdf] | [PmodLS1_sch.pdf] |
| Blue-Tooth | [PmodBT2_rm.pdf] | [PmodBT2_sch.pdf] |
| IR-Reflexlichtschranke | [QRB1134-Fairchild.pdf] | |
| IR-Abstandssensor | [IR Range Sensor rm.pdf] |
Vergangene Semester
Informatikwerkstatt-MR WS 14/15
Informatikwerkstatt-MR WS 14/15
Informatikwerkstatt-MR WS 13/14