Industrieroboter
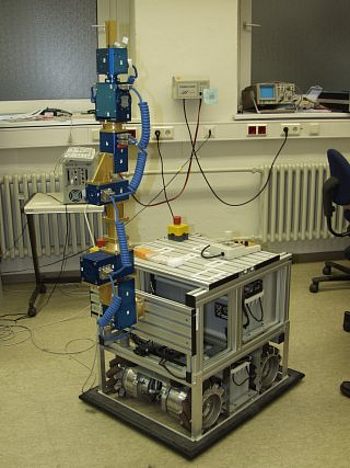
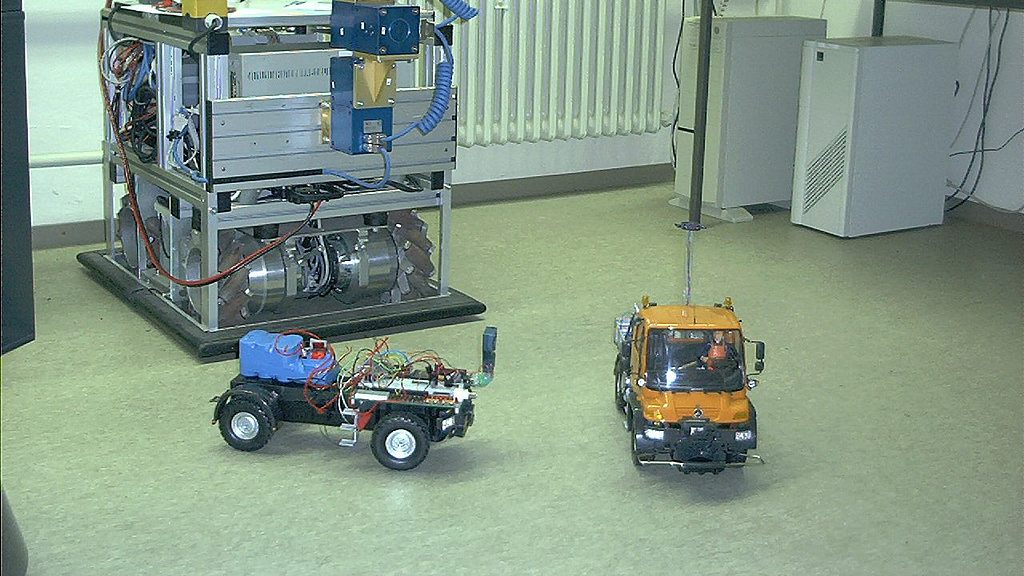
Arbeitsgegenstand ist ein mobiler Industrieroboter mit LKW-Akkus, Fahrwerk, 6-Gelenke-Arm, eingebautem PC und Funknetz. Arm und Fahrwerk werden über eine CAN-Bus-Karte im Roboter-PC gesteuert. Auf dem Roboter-PC wird in der Regel über ssh/scp von einem stationären Arbeitsplatzrechner aus gearbeitet und programmiert.
Fahrwerk
Aufbau, Bedienung, Sicherheitshinweise und Dokumentationen zum Fahrwerks
Arm
Der Roboterarm ist aus 6 Power-Cube-Modulen plus einen Finger zusammengesetzt.
Entwicklung eines Sensorkonzeptes für die Roboterhand: Diplomarbeit Matthias Arndt
Betriebssystem
Besonderheiten der Betriebssysteme der beteiligten Rechner
CAN-Bus-Karten von ESD
Veröffentlichungen
Christian Asam: Inbetriebnahme eines Power-Cube-Roboterarmes; Entwicklung eines C167-Monitors und des PC-Gegenstücks zur Steuerung der Armgrundfunktionen.