Arm
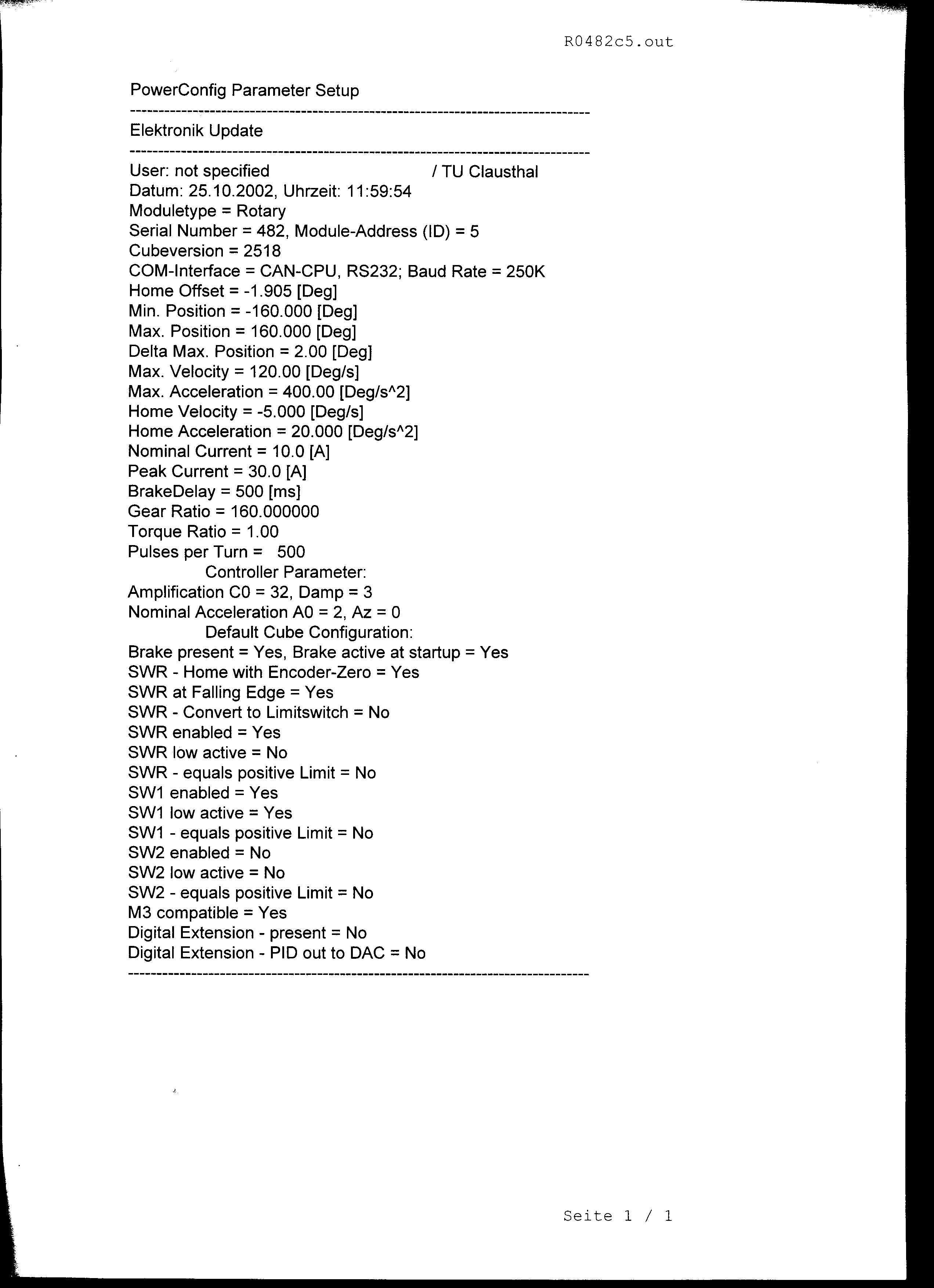
Der Roboterarm ist aus 6 Power-Cube-Modulen plus einen Finger zusammengesetzt.

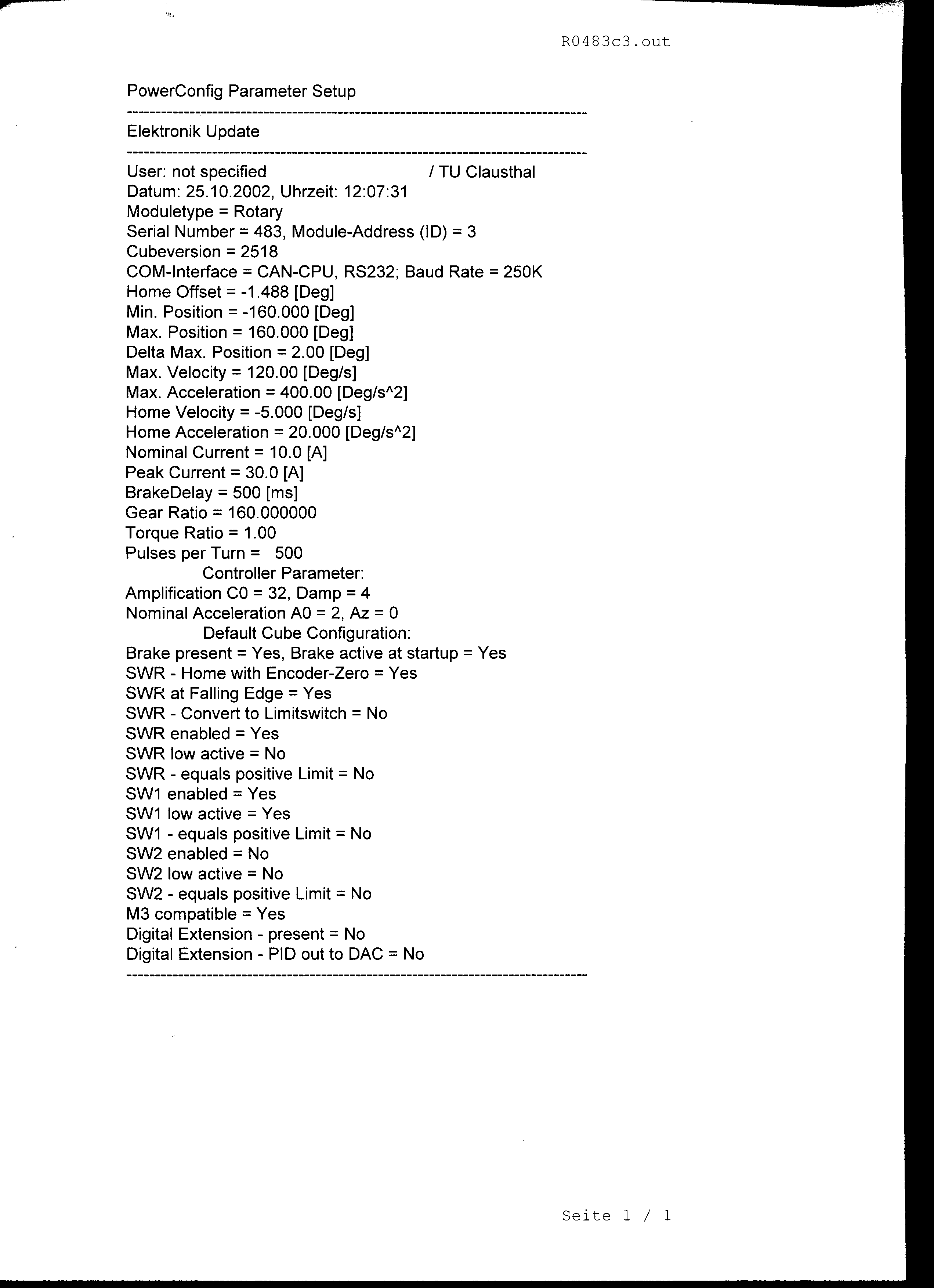
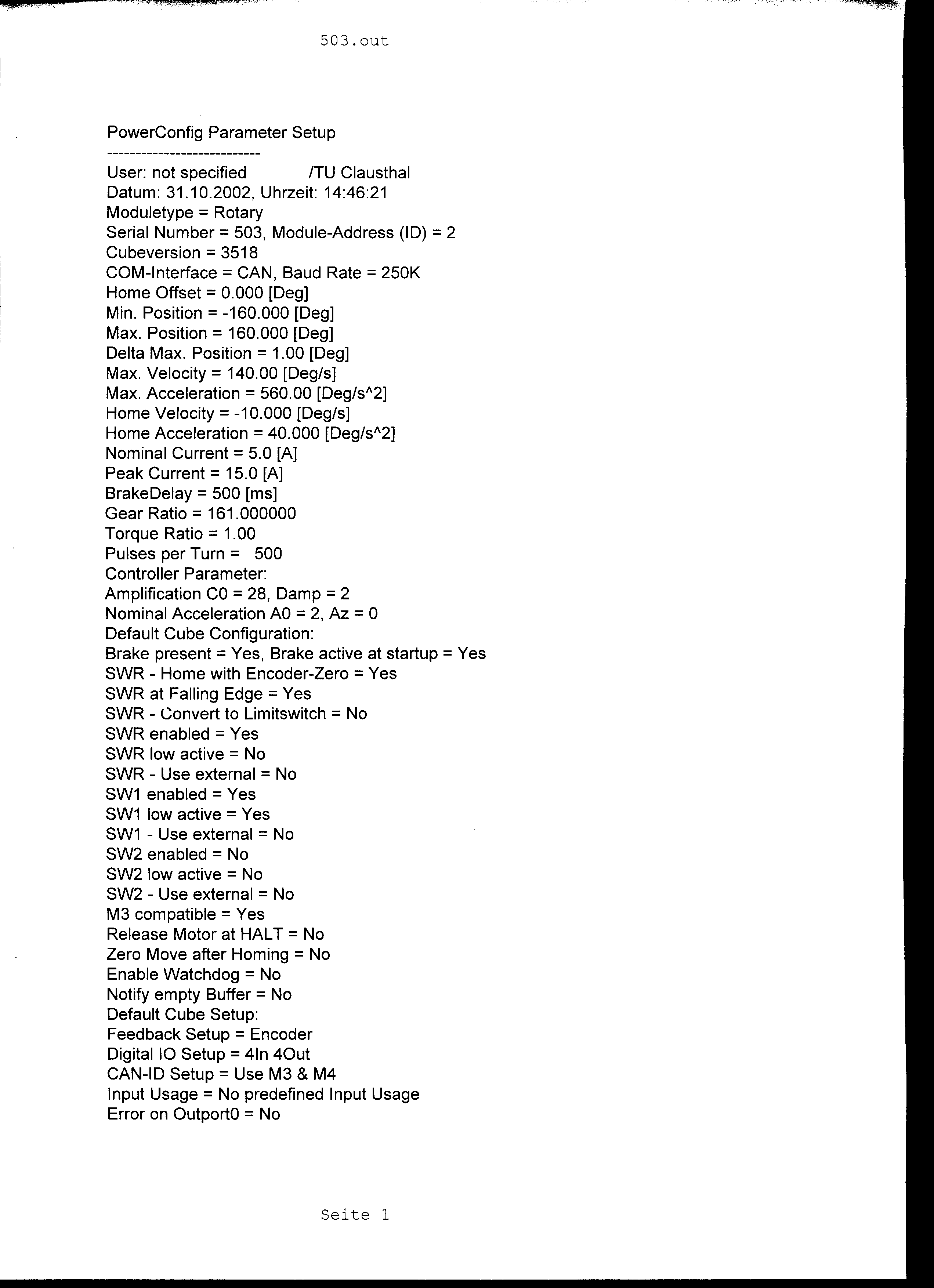
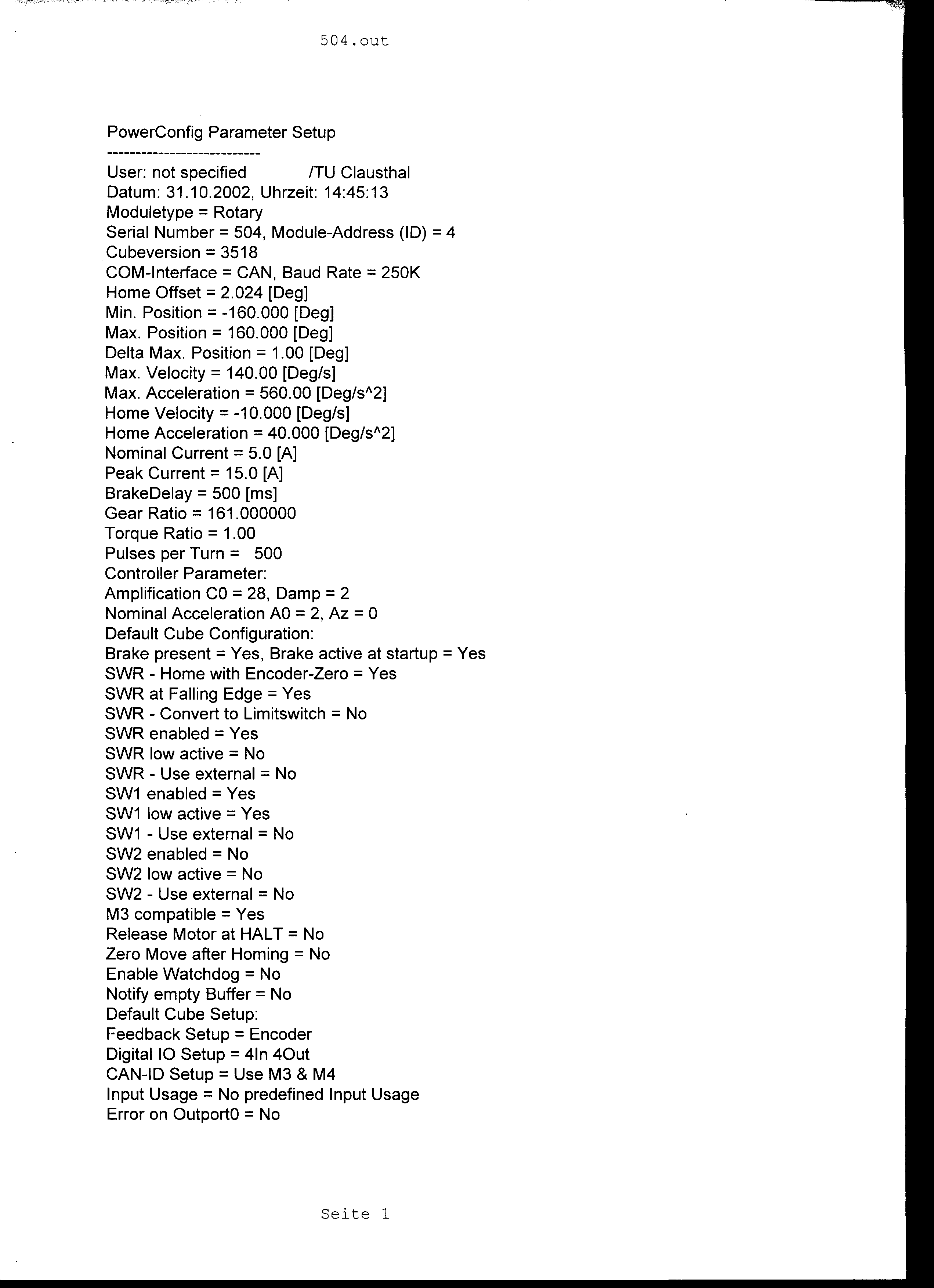
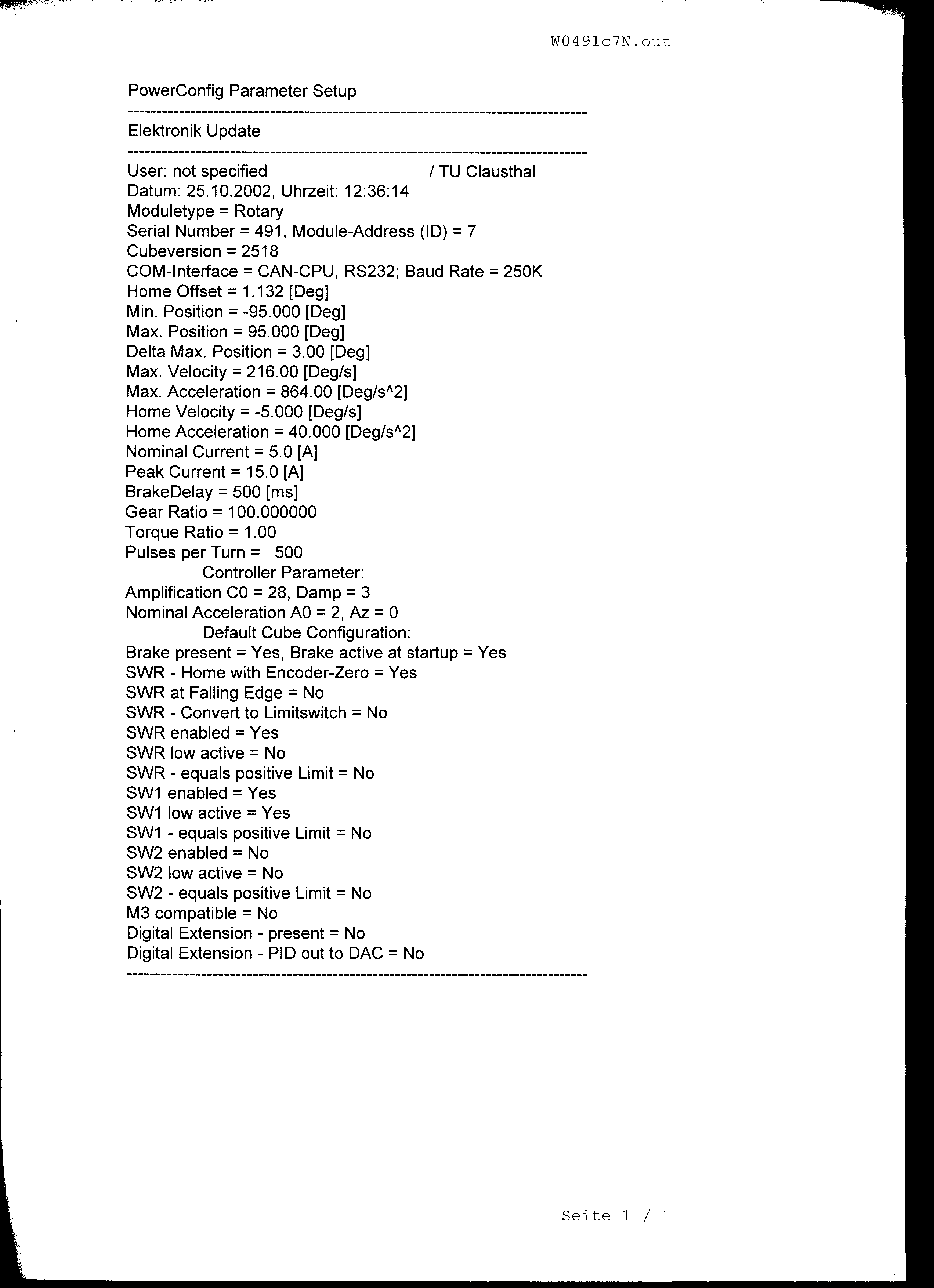
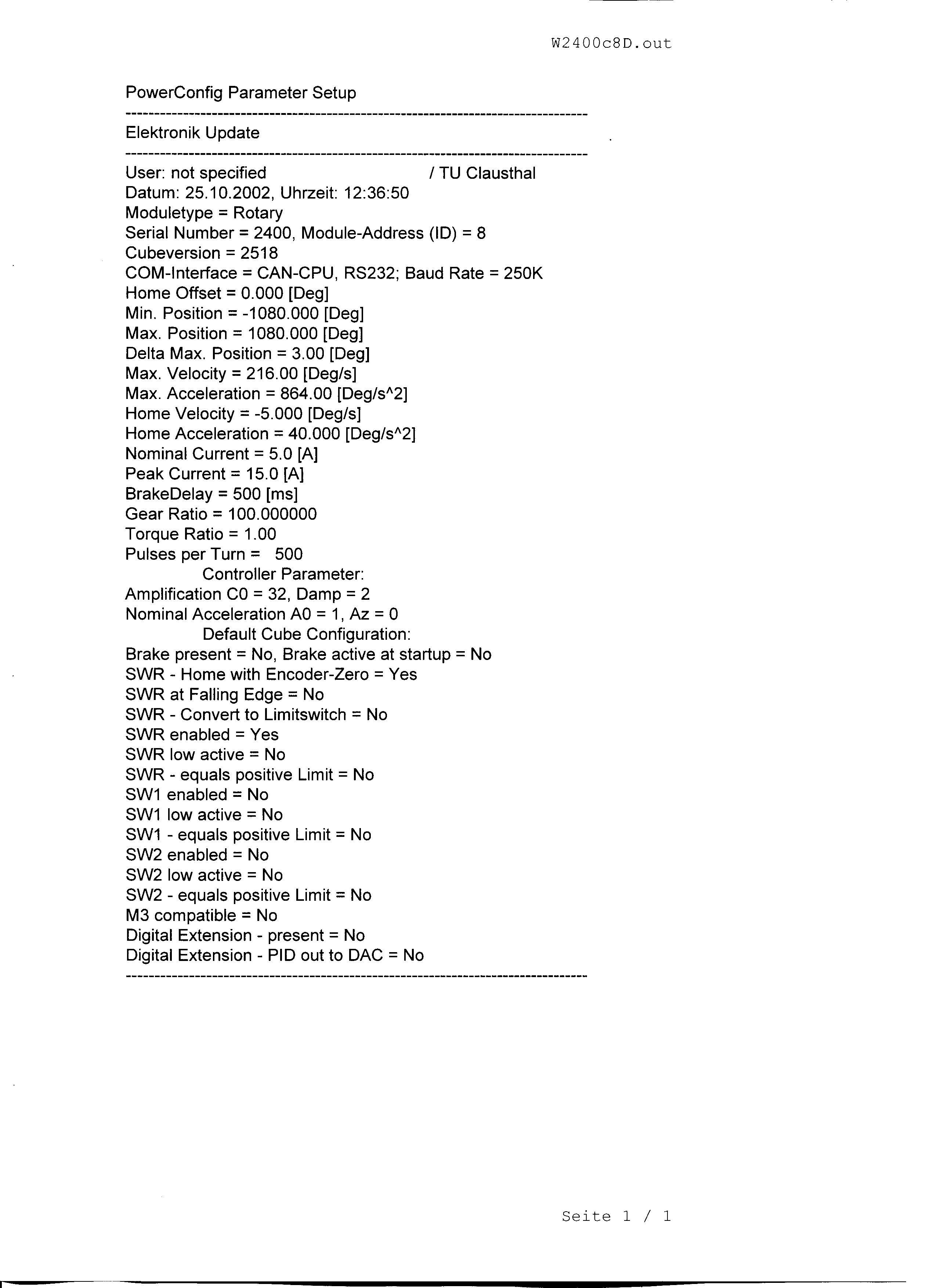
Daten der Rotationsmodule:
|
Daten des Fingers: Seriennummer: 5c2, Modul-ID: 9, Aktionsbereich von -0.5mm bis 58mm
Der Roboterarm ist aus 6 Power-Cube-Modulen plus einen Finger zusammengesetzt.
|
Daten des Fingers: Seriennummer: 5c2, Modul-ID: 9, Aktionsbereich von -0.5mm bis 58mm